Gripper
Finding a appropriate force for control gripper
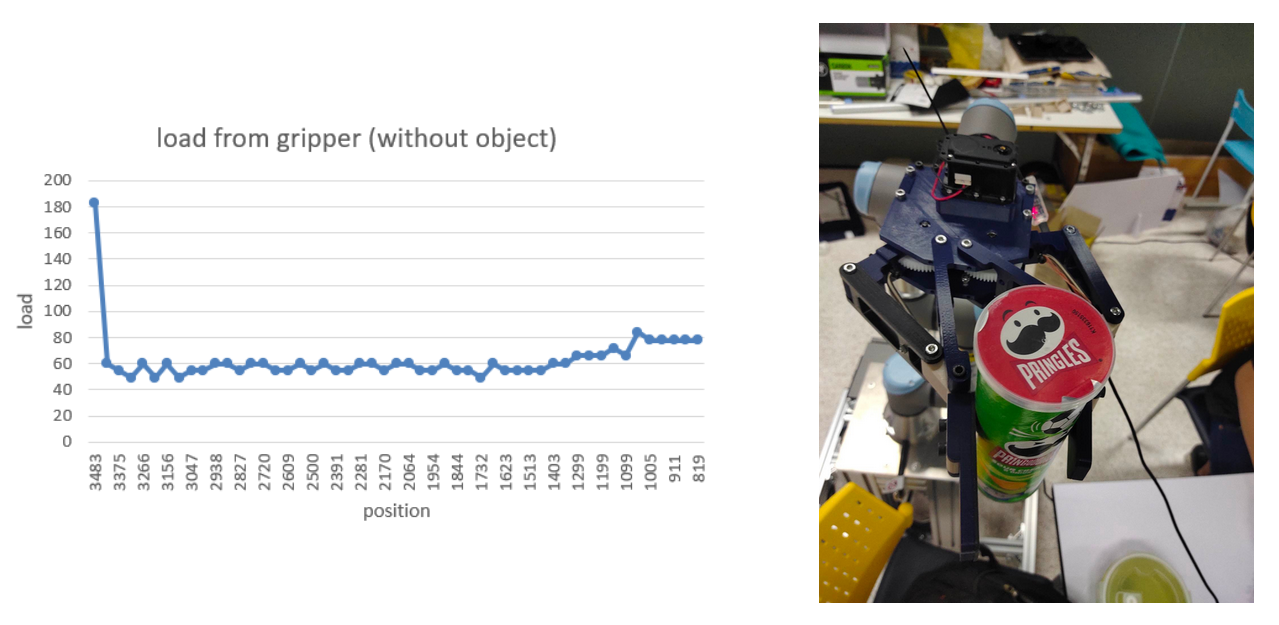
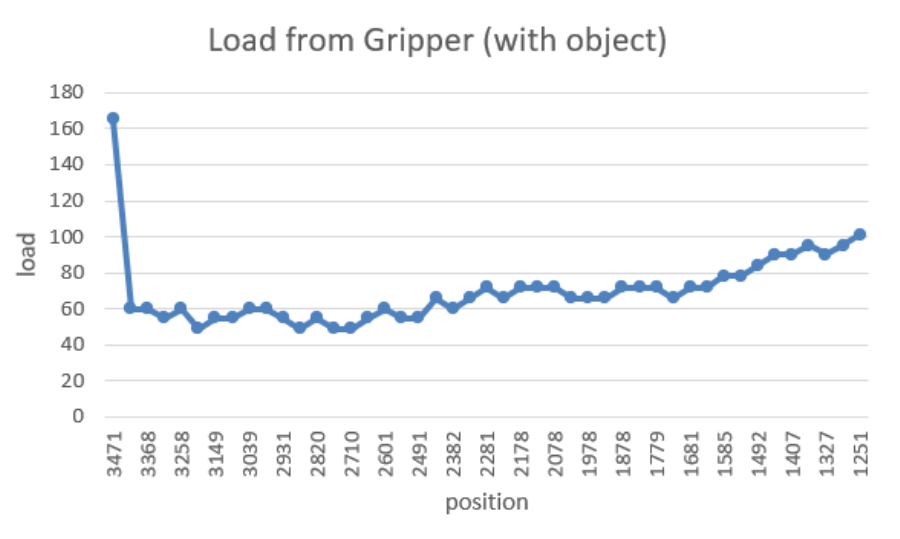
Dynamixel has a present load function for reading the currently applied load. To find an appropriate force for a gripper to pick up an object, a pringles’s box is used in the experiment. The moving speed of the dynamixel is 12 rpm/min and its moving position is in range 800 - 3600. When the gripper close without grab any object, present load is show below
Load |
Result(pass/fail) |
|---|---|
80 |
fail |
85 |
fail |
90 |
fail |
95 |
fail |
100 |
pass |
According to the result, an appropriate load for control gripper is 100 (10% of maximum torque)
Testing an appropriate force with other object
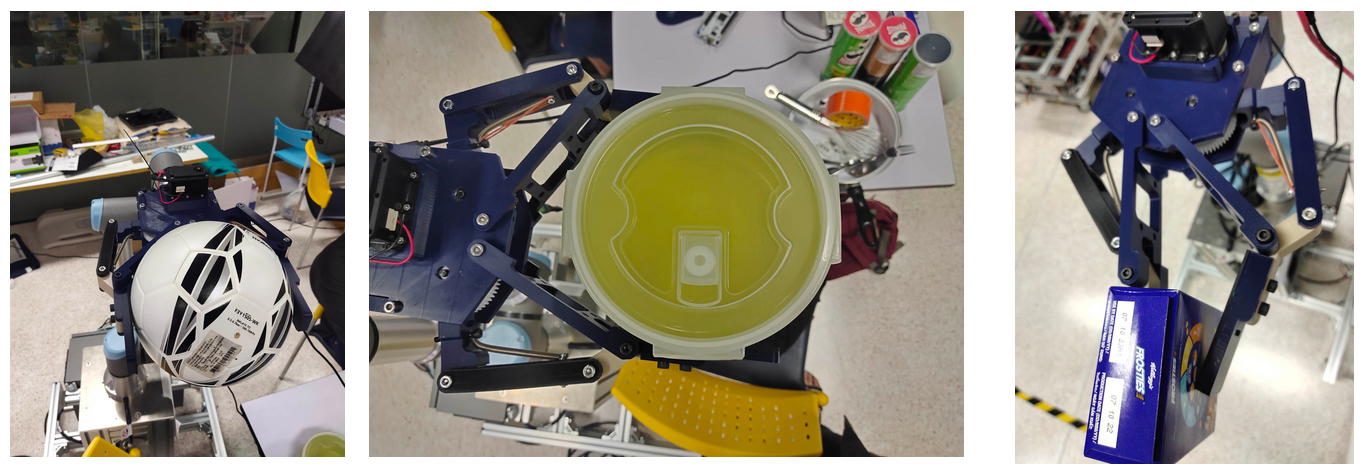
According to experiment 1, an appropriate load is 100. In this experiment a mini soccer ball, lunch box, cereal box, fork, screw, bolt, hex wrench, duct tape, whisk and T-shirt are used.
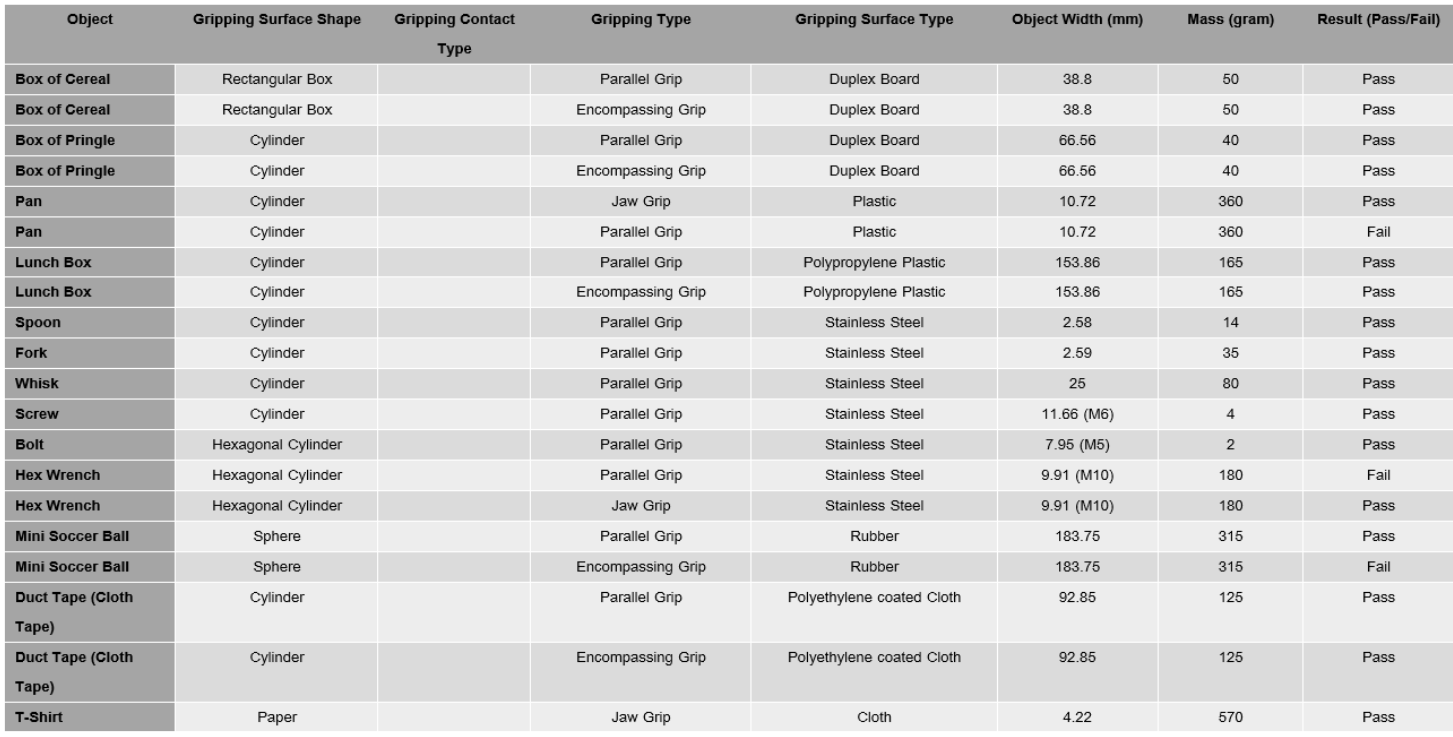
According to the result, A gripper can grip different objects by different pose 17 pose from 20 pose. But a gripper still has some problems with a mechanical part.