Wheel Velocity Estimation
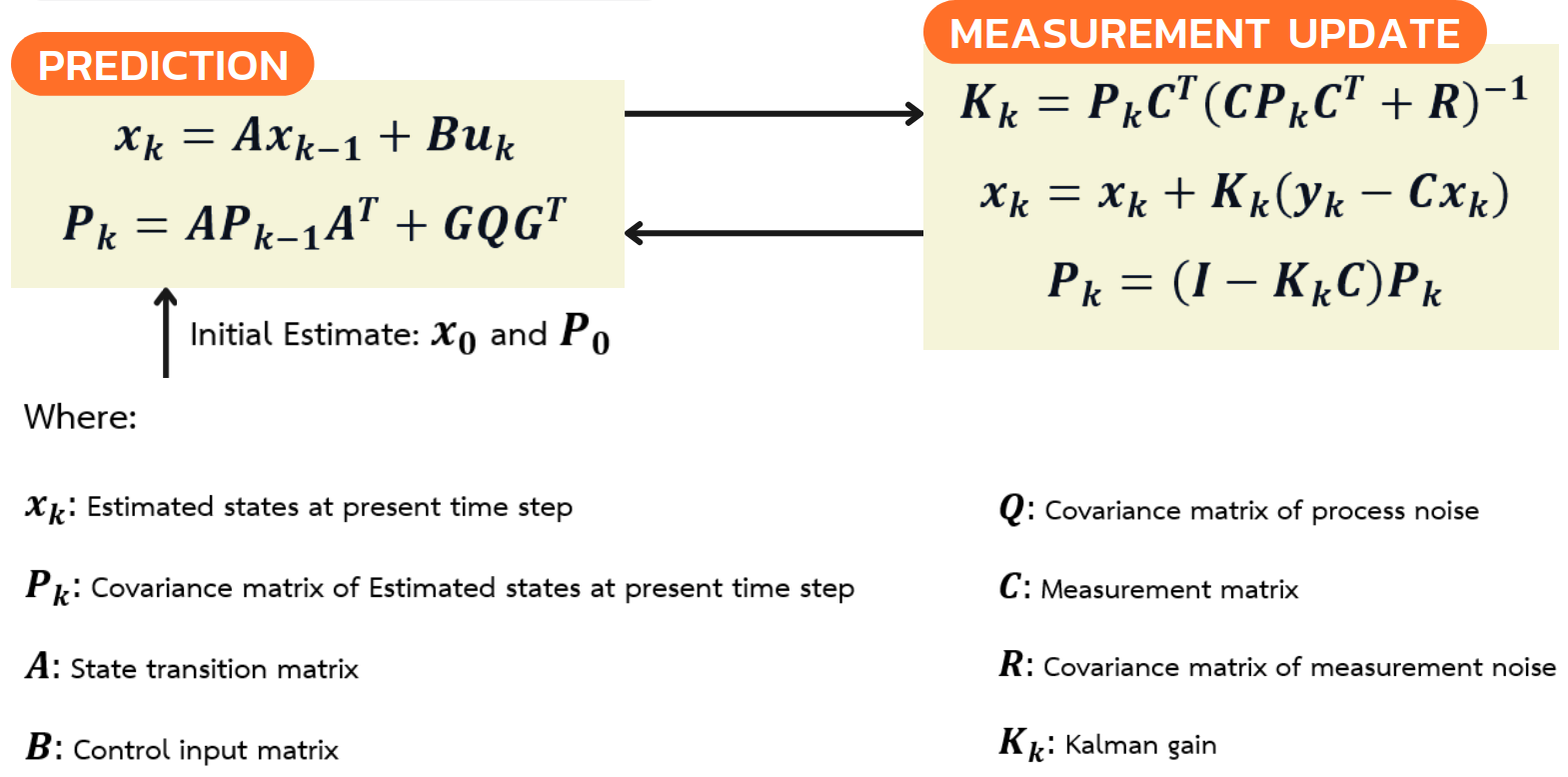
Kalman Filter Algorithms
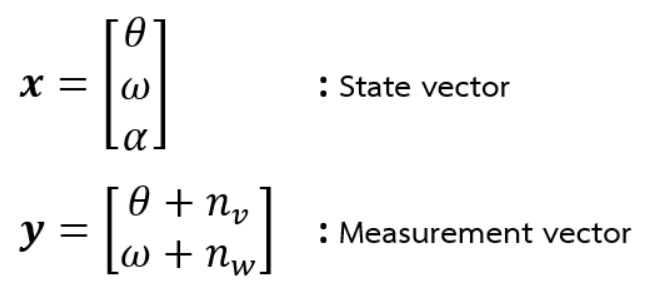
Kinematics Base Model
Assumption: Zero mean gaussian jerk


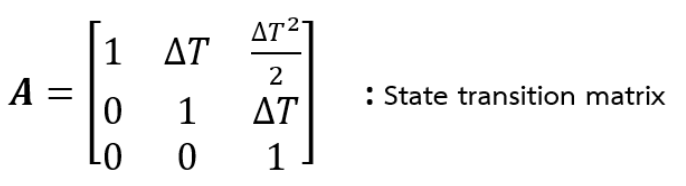
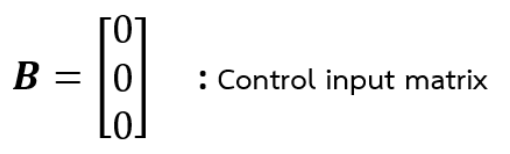



Matrix Summary

Kalman Output

Implemention (Core M7)
void Predict_RightWheel()
{
X_R = A*X_R + B*U;
P_R = A*P_R*(A.transpose()) + G*Q_R*(G.transpose());
}
float UserCodeUpdateRightWheel(float position, float velocity)
{
Predict_RightWheel();
Y_R(0,0) = position; // assign value of encoder
Y_R(1,0) = velocity; // assign value of encoder
K_R = P_R*(C.transpose()) * (C*P_R*(C.transpose()) + R_R).inverse();
X_R = X_R + K_R*(Y_R - C*X_R); // get new X(estimated state)
P_R = (MatrixXf::Identity(3,3) - K_R*C) * P_R;
return X_R(1,0); // get estimated velocity
}
void Predict_LeftWheel()
{
X_L = A*X_L + B*U;
P_L = A*P_L*(A.transpose()) + G*Q_L*(G.transpose());
}
float UserCodeUpdateLeftWheel(float position, float velocity)
{
Predict_LeftWheel();
Y_L(0,0) = position; // assign value of encoder
Y_L(1,0) = velocity; // assign value of encoder
K_L = P_L*(C.transpose()) * (C*P_L*(C.transpose()) + R_L).inverse();
X_L = X_L + K_L*(Y_L - C*X_L); // get new X(estimated state)
P_L = (MatrixXf::Identity(3,3) - K_L*C) * P_L;
return X_L(1,0); // get estimated velocity
}
Runtime Test
runstarttime = micros();
//******************************************************************************************************
Pulse2Position();
estimated_rightvel = update_rightwheel(Right_DegRel, Right_DegSec)*(M_PI/180)*0.085; // DegSec to m/s
estimated_leftvel = update_leftwheel(Left_DegRel, Left_DegSec)*(M_PI/180)*0.085; // DegSec to m/s
//******************************************************************************************************
runtime = micros() - runstarttime;
Runtime: 0.059 ms