Wheel Odometry
Related Subsystem
Objective
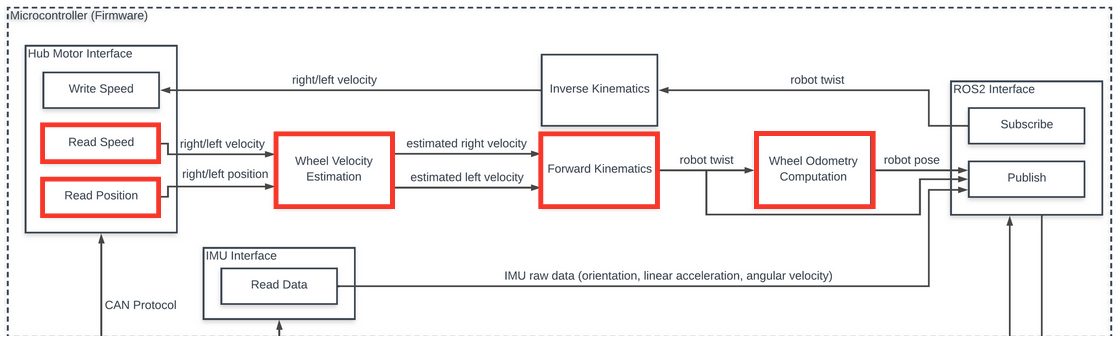
Efficiency of the wheel odometry computation process of the robot was evaluated after integration of both high-level and low-lovel systems consisting of the main computational subsystems Hub motor interface, Wheel velocity estimation, Forward kinematics, Wheel odometry computation by measuring the tolerance of the robot current position (x, y)
Procedure
Turn on manual robot control using teleop_twist_keyboard
Control the robot to move forward in the x-axis of the odom frame to 10 cm, 20 cm, 30 cm, 40 cm, and 50 cm for 10 times
Control the robot to move forward in the y-axis of the odom frame to 10 cm, 20 cm, 30 cm, 40 cm, and 50 cm for 10 times
Take the value (x, y) from topic: wheel/odometry then calculate tolerance compared to the actual distance traveled
Evaluate the efficiency of the wheel odometry process
Results
X-axis of odom frame
Displacement(cm) |
Trial 1 |
Trial 2 |
Trial 3 |
Trial 4 |
Trial 5 |
Trial 6 |
Trial 7 |
Trial 8 |
Trial 9 |
Trial 10 |
Error |
|---|---|---|---|---|---|---|---|---|---|---|---|
10 |
16.301 |
15.666 |
14.385 |
15.109 |
14.806 |
13.824 |
15.326 |
14.754 |
12.798 |
14.759 |
6.301 |
20 |
24.148 |
25.648 |
24.634 |
25.608 |
23.975 |
24.009 |
27.571 |
26.895 |
24.896 |
25.131 |
7.571 |
30 |
33.171 |
34.045 |
37.269 |
38.018 |
37.849 |
37.198 |
37.445 |
34.058 |
35.816 |
34.092 |
8.018 |
40 |
41.120 |
45.389 |
47.653 |
47.928 |
44.554 |
48.872 |
46.679 |
47.987 |
49.983 |
41.452 |
9.983 |
50 |
58.673 |
60.765 |
58.292 |
58.718 |
59.240 |
59.934 |
59.685 |
54.303 |
58.012 |
54.778 |
10.765 |
X-axis analysis
Wheel odometry calculations can give the robot position in the x-axis of the odom frame with a maximum tolerance of 10.765 cm within a displacement of 50 cm.
Y-axis of odom frame
Displacement(cm) |
Trial 1 |
Trial 2 |
Trial 3 |
Trial 4 |
Trial 5 |
Trial 6 |
Trial 7 |
Trial 8 |
Trial 9 |
Trial 10 |
Error |
|---|---|---|---|---|---|---|---|---|---|---|---|
10 |
13.053 |
13.918 |
10.839 |
12.218 |
14.411 |
18.399 |
13.068 |
13.633 |
10.771 |
12.512 |
8.399 |
20 |
24.618 |
26.900 |
21.512 |
21.728 |
28.835 |
27.147 |
27.358 |
25.806 |
26.171 |
28.651 |
8.835 |
30 |
35.500 |
39.764 |
35.651 |
36.811 |
37.807 |
41.850 |
38.883 |
33.653 |
37.776 |
38.319 |
11.850 |
40 |
48.260 |
47.996 |
44.945 |
46.897 |
51.780 |
48.071 |
53.822 |
45.850 |
48.139 |
50.887 |
13.822 |
50 |
62.130 |
60.422 |
58.491 |
60.030 |
63.659 |
65.620 |
64.561 |
58.032 |
67.028 |
67.626 |
17.028 |
Y-axis analysis
Wheel odometry calculations can give the robot position in the x-axis of the odom frame with a maximum tolerance of 17.028 cm within a displacement of 50 cm.